





研究成果

Title: Miniaturized Swimming Soft Robot with Complex Movement Actuated and Controlled by Remote Light Signals
Author: Chaolei Huang, Jiu-an Lv, Xiaojun Tian*, Yuechao Wang, Yanlei Yu*, Jie Liu*
Journal: Sci. Rep., 2015, 5, 17414
Abstract:
Powering and communication with micro robots to enable complex functions is a long-standing challenge as the size of robots continues to shrink. Physical connection of wires or components needed for wireless communication are complex and limited by the size of electronic and energy storage devices, making miniaturization of robots difficult. To explore an alternative solution, we designed and fabricated a micro soft swimming robot with both powering and controlling functions provided by remote light, which does not carry any electronic devices and batteries. In this approach, a polymer film containing azobenzene chromophore which is sensitive to ultra-violet (UV) light works as “motor”, and the UV light and visible light work as “power and signal lines”. Periodically flashing UV light and white light drives the robot flagellum periodically to swing to eventually push forward the robot in the glass tube filled with liquid. The gripper on robot head can be opened or closed by lights to grab and carry the load. This kind of remotely light-driven approach realizes complex driving and controlling of micro robotic structures, making it possible to design and fabricate even smaller robots. It will have great potential among applications in the micro machine and robot fields.
论文链接:https://www.nature.com/articles/srep17414
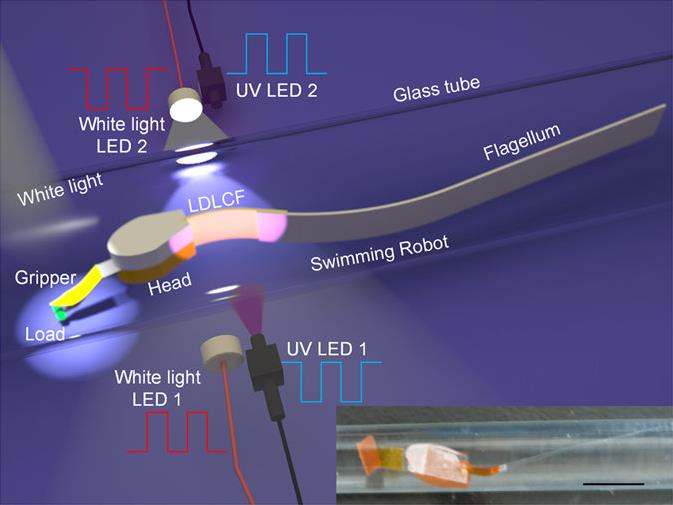
我们基于光驱动液晶膜(LDLCF)制作了一种具有抓手的光驱动微型游泳机器人,实现了游泳、抓取、搬运、运输等复杂动作。机器人利用无线、无噪声的光驱动的“手”来捕获和运输对象,它可以在狭长液体环境,如在微流控设备和系统中使用,或在电磁噪声敏感的环境中,实现捕获、运输、操纵等行为。实验结果表明,该光驱动方式可以实现非接触供能、驱动和复杂运动控制。由于这种方式不需要任何电池或电源线、信息处理单元和线路,也不需要任何电机和传输系统,因此大大简化了机器人的结构。这种简单的微型机器人在微型机械和机器人领域有着巨大的应用潜力。
电话:021-31243661
传真:021-31243661
邮编:200438
地址:上海市杨浦区淞沪路2005号,复旦大学智能材料与未来能源创新学院(先进材料楼725)
网址:http://lcpolymergroup.fudan.edu.cn
电子邮件:ylyu@fudan.edu.cn
