





研究成果

Title: Photoresponsive Liquid Grippers for Multi-Dimensional Droplet Manipulation
Author: Yu Pu, Lixin Jiang, Xin Qing, Yitian Ming, Jiaqiang Li, Lang Qin*,Yanlei Yu*
Journal: Small Methods, 2026, 0, e02161
Abstract:
Droplet manipulation has significant value in a wide range of areas, such as microfluidics, medical diagnosis, and detection.However, high-precision droplet manipulation with arbitrary control on an open surface still poses a substantial challenge,particularly in 3D droplet manipulation. Here, we propose a bilayer photoresponsive liquid gripper (PLG), which integratesan “adhesive layer” and an “actuation layer” to enable sustainable capture and release for precise 3D droplet manipulation ofhigh-viscosity fluids (e.g., blood, serum, and pH solutions). The “adhesive layer” featuring a superhydrophobic microarrayedpolydimethylsiloxane surface allows nondestructive droplet capture. Meanwhile, the “actuation layer” leverages the photo-induced bending of photodeformable crosslinked liquid crystal polymers to release the droplet without altering its surfacewettability. Moreover, by simply adjusting the microstructures of its surface, PLG allows the selective capture of droplets ofparticular sizes, providing a new tool for droplet screening. Biochemical reactions, including blood detection, neutralizationreactions, and immunoassays, are successfully demonstrated via the PLG system, underscoring its utility as an effective andversatile platform for complex droplet manipulation, biological analysis, and routine biochemical investigations.
论文链接:https://onlinelibrary.wiley.com/doi/10.1002/smtd.202502161
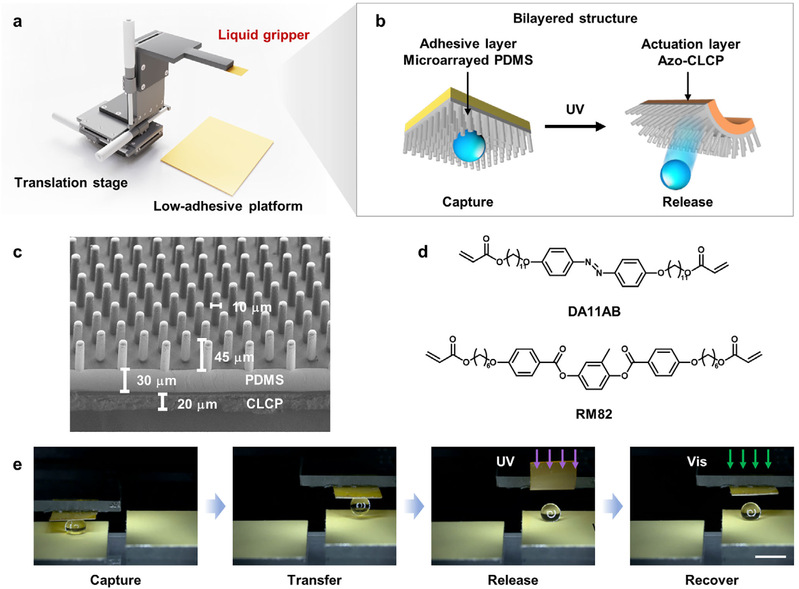
液滴操控在微流控、生物检测和化学合成等领域具有重要价值,但传统方法多局限于二维平面内的运输、融合与分离,难以满足复杂三维流体网络构建和微量检测的需求。尽管基于固体的机械夹持器已实现三维操控,但其在液体环境中存在液滴残留、交叉污染和剪切力损伤等问题。受固体夹持器启发,液体夹持器通过垂直力作用克服重力和基底粘附,实现了三维液滴操控,但现有方法仍需在释放时改变表面浸润性,限制了其在高粘附液滴和生物样本中的应用。
本文提出并构建了一种双层结构的光响应液体夹持器(PLG),由微柱阵列PDMS“粘附层”和含偶氮苯的交联液晶聚合物(CLCP)“驱动层”组成。该夹持器利用微柱阵列实现高粘附液滴的无损捕获,通过紫外光诱导CLCP层弯曲变形改变液滴受力状态,将重力势能转化为动能,在不改变表面浸润性的前提下实现液滴的可控释放。通过调节微柱间距,PLG可实现对特定体积液滴的选择性捕获,并成功应用于高粘度流体的传输以及免疫检测等生化反应,为复杂液滴操控提供了新工具。
电话:021-31243661
传真:021-31243661
邮编:200438
地址:上海市杨浦区淞沪路2005号,复旦大学智能材料与未来能源创新学院(先进材料楼725)
网址:http://lcpolymergroup.fudan.edu.cn
电子邮件:ylyu@fudan.edu.cn
