





研究成果

Title: Adaptive Locomotion of Pleurotya Caterpillar-Inspired Segmental Crawling Robots with Multiple Postures
Author: Yanfu Tang, Feng Pan, Lang Qin*, Yanlei Yu*
Journal: Adv. Funct. Mater., 2025, 35(42), 2506987
Abstract:
Soft crawling robots capable of adjusting postures and generating adaptive locomotion modes are in high demand for autonomous adaptation to varying environments. Appropriate postures generated by robots’ deformation are crucial for diverse target locomotion. However, achieving multiple postures for integrating bidirectional crawling, crawling-to-rolling mode switching, and self-righting capability remains challenging. Herein, inspired by the kinematics of Pleurotya caterpillars, dynamic curvature controllability, which is realized through combining segmental structures and high curvature bending of each segment, is an effective strategy for active shape adaptation and attaining multiple postures. Segmental soft crawling robots, termed CRAWL, are fabricated by incorporating soft liquid crystal elastomers (LCEs) and rigid acrylic resin via multi-material 4D printing. The high curvature bending of each segment is attributed to the gradient alignment of mesogens induced by the non-uniform shear forces. The tunable curvature of the CRAWL is achieved through light-fueled bending of designated LCEs within the segmental structure on demand. This enables the CRAWL to obtain multiple postures and thus perform adaptive locomotion, including bidirectional crawling, curling into a loop, and rolling downhill, as well as correcting their postures through self-righting behavior when losing balance. This work provides new insights for designing soft robots with enhanced environmental adaptability.
论文链接:https://advanced.onlinelibrary.wiley.com/doi/10.1002/adfm.202506987
软体爬行机器人因具有低重心、优异的通过性等优势,在地形探索、管道检测等操作空间受限的应用中展现出巨大的应用潜力。为了增强其对多变环境的自主适应能力并提升运动效率,开发能够利用可控形变灵活调整姿态并产生与环境相匹配运动模式的软体爬行机器人具有重要意义。双向爬行作为一种基础的自适应运动策略,使爬行机器人无需整体调头即可反转运动方向,有效提升了其在狭窄环境中的工作效率。实现双向爬行的主要挑战在于调控爬行机器人不同曲率的姿态,进而通过调整重心位置以及与地面的接触角来控制各向异性摩擦。爬行-滚动运动模式切换代表了一种适应从平坦表面到坡面等地形过渡场景的先进自适应运动策略,其难点在于曲率可调的爬行姿态与适于滚动的卷曲姿态之间的无缝转换。此外,由于身体卷曲是一种高度不稳定的运动,软体机器人在滚动后可能处于倒置状态,从而导致运动终止。因此,软体爬行机器人自我矫正姿态的能力对于实现不同地形下的连续运动同样至关重要。由于需要多种姿态的设计与协同,开发一种集双向爬行、爬行-滚动模式切换和自我矫正能力于一体的软体爬行机器人仍是一项重大挑战。
受珍珠母毛虫的启发,我们组提出了一种具有自适应与精准运动控制能力的分段式爬行机器人(Crawling Robot with Adaptive Well-controlled Locomotion),并将其命名为“CRAWL”。该分节结构通过先进的多材料4D打印技术实现,其设计基于柔性液晶弹性体(LCE)与刚性丙烯酸树脂的交替组装。在制造过程中,通过引入喷嘴外轮廓剪切方法,诱导LCE节段内的液晶基元沿厚度方向形成梯度取向,从而产生超大曲率弯曲以实现形状自适应。此外,通过具有时空可控性的近红外光照射,可利用局部光热效应选择性诱导目标LCE节段的形变,从而按需调控CRAWL的曲率。基于上述设计,CRAWL能够动态调整多种姿态以展现自适应运动能力,具体表现为:利用曲率可调的拱形构型实现双向运动控制,借助整体卷曲在爬行和滚动模式之间动态切换步态,以及通过局部节段调控完成自主姿态矫正。这些功能使CRAWL能够在不同地形条件下高效执行连续运动,凸显了其在需要动态机械智能的非结构化环境中的操作潜力。
珍珠母毛虫的结构与运动行为
自然界中的珍珠母毛虫(Pleurotya caterpillar)展现出卓越的多姿态调控能力,包括具有可调弯曲曲率的拱形姿态,以及局部或整体卷曲的卷曲姿态。基于这种能力,珍珠母毛虫能够实现多种自适应运动模式,例如在平坦表面上的双向爬行、在斜坡上卷曲成环后滚动下坡,以及通过自我矫正恢复姿态平衡(图1)。毛虫的动态曲率可控性源于其分段肌肉与外骨骼之间的协同作用。具体而言,肌肉通过驱动和控制毛虫的形变,使每个节段能够灵活地实现大曲率弯曲,而外骨骼则为其提供必要的结构支撑和保护。受珍珠母毛虫结构与运动性能的启发,实现软体爬行机器人灵活曲率控制的关键在于刚柔耦合分节结构的设计以及各节段大曲率弯曲形变的协同。这需要将先进的多材料加工技术与能够实现大曲率弯曲的智能材料相结合,从而为仿生软体机器人的设计提供重要的理论依据和技术启示。
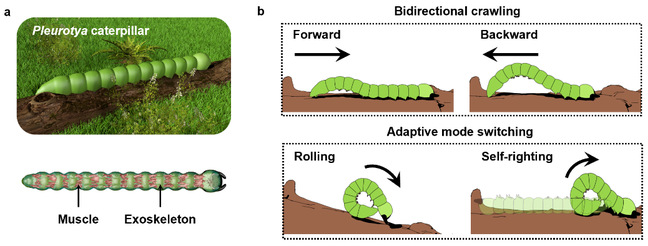
图1.(a)珍珠母毛虫的结构示意图。毛虫的肌肉附着于体壁的内层,而体壁则由表皮细胞分泌的外骨骼构成。(b)珍珠母毛虫的自适应运动行为,包括双向爬行、滚动以及自我矫正。
CRAWL的构筑与设计
CRAWL的设计基于以下三个核心标准:(1)分节结构中的人工肌肉与聚合物外骨骼单元具有机械兼容性;(2)分节结构内的各个人工肌肉单元能够独立灵活控制;(3)人工肌肉单元具备大曲率弯曲能力。
a.刚柔耦合分节结构的设计。为了确保CRAWL在形变过程中的结构完整性,并通过抑制屈曲现象以维持运动稳定性,其人工肌肉与聚合物外骨骼单元需具备相匹配的模量【条件(1)】。为满足这一要求,研究团队分别选用柔性光响应性液晶弹性体(LCE-MWCNTs)和刚性丙烯酸树脂作为人工肌肉和聚合物外骨骼材料。根据两种材料的应力-应变曲线(图2b),所选丙烯酸树脂的弹性模量较高(E: 578.9 ± 20.5 MPa),处于典型天然外骨骼的模量范围(100~800 MPa)内;而LCE-MWCNTs则表现出较低的弹性模量(E: 29.8 ± 2.2 MPa)。这种模量匹配设计充分模拟了毛虫肌肉与外骨骼的基本组合特征,为CRAWL实现仿毛虫自适应运动提供了关键的力学支持。进一步地,通过先进的多材料4D打印技术,利用光响应性LCE-MWCNTs与非响应性丙烯酸树脂构筑分节结构(图2c)。其中,LCE-MWCNTs与丙烯酸树脂节段沿CRAWL的体长方向交替排列,以有效促进CRAWL的拱起行为并驱动其爬行运动。分节结构的离散特性结合光驱动的定点可控优势,实现了结构中各个人工肌肉单元的独立灵活控制【条件(2)】。
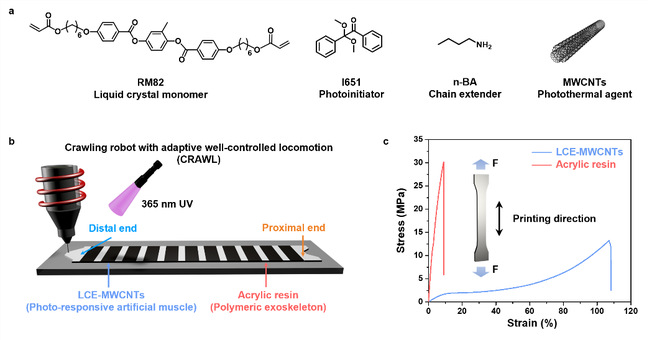
图2.(a)通过aza-Michael加成反应制备LCE-MWCNTs所用的组分,包括液晶单体RM82、扩链剂正丁胺(n-BA)、光引发剂I651以及光热试剂多壁碳纳米管(MWCNTs)。(b)CRAWL的4D打印过程示意图。其分节结构由LCE-MWCNTs光响应人工肌肉和丙烯酸树脂聚合物外骨骼交替相连而成。(c)LCE-MWCNTs光响应人工肌肉和丙烯酸树脂聚合物外骨骼的应力-应变曲线。插图表示用于拉伸测试的4D打印哑铃形结构。
b. LCE-MWCNTs人工肌肉单元的大曲率弯曲能力。为了实现LCE-MWCNTs的大曲率弯曲形变,研究团队在4D打印的过程中采用了一种喷嘴外轮廓剪切的取向方法,以促进液晶基元的梯度排列。具体而言,该打印过程涉及两种不同的剪切模式(图3a):(1)喷嘴内部的对称剪切,诱导多畴介晶形成均一排列;(2)喷嘴末端处的非对称剪切,此时额外的剪切力作用于挤出材料的上表面,从而促使介晶在厚度方向上形成梯度排列。掠入射X射线衍射(XRD)分析证实了这种梯度排列的存在,LCE-MWCNTs上表面的取向参数(0.60)显著高于下表面(0.28)(图3b、3c)。在1 W·cm-2的NIR辐照下,由于MWCNTs的光热效应,LCE-MWCNTs打印薄膜的表面温度在2 s内升温至其TNI以上。由于液晶基元在厚度方向呈梯度取向,上表面的收缩率大于下表面,液晶相转变引发其可逆弯曲,且弯曲曲率大于2π/L,其中L是薄膜的长度(图3d)。这种大曲率可逆弯曲行为是实现CRAWL仿毛虫自适应运动行为的关键条件。
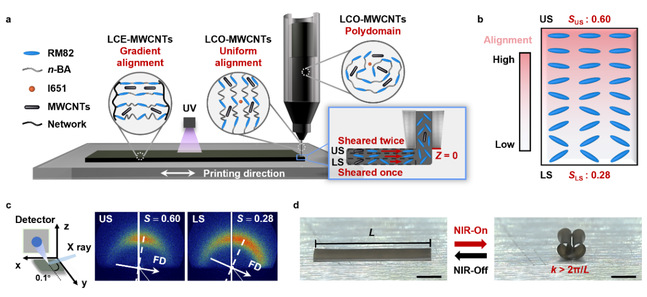
图3.(a)基于喷嘴外轮廓剪切的4D打印过程示意图。其中,US和LS分别表示上表面和下表面。z表示喷嘴末端与打印物体上表面之间的距离。(b)LCE-MWCNTs打印薄膜的横截面示意图。(c)以0.1°的掠入射角度测得的LCE-MWCNTs打印薄膜上下表面的二维XRD图像;(d)1 W·cm-2的NIR辐照下,LCE-MWCNTs打印薄膜的大曲率可逆弯曲。其中,k表示曲率。比例尺:5 mm。
CRAWL的双向爬行
CRAWL实现双向爬行的关键因素在于两端摩擦力的精确调控。研究团队通过从尾至头按序刺激单个LCE-MWCNTs节段,使CRAWL产生连续的局部小曲率弯曲,从而控制首尾端的摩擦力合力始终朝向首端,实现向前爬行(图4a、4b)。
在珍珠母毛虫向后爬行的过程中,其运动学特征与前进模式正好相反,此时蠕动波从首端开始并向尾端传播。因此,研究者通过依次同时刺激3个LCE-MWCNTs节段,使CRAWL从首端至尾端产生局部、大曲率的弯曲形变,形成了一种大曲率的拱起姿态(图4c)。在该过程中,CRAWL的首尾端逐渐翘起,导致两端与地面的接触面积之间产生了明显的差异。由于重心位置和与地面接触角度的共同作用,摩擦力合力始终指向CRAWL的尾端,因而驱动其向后爬行(图4d)。
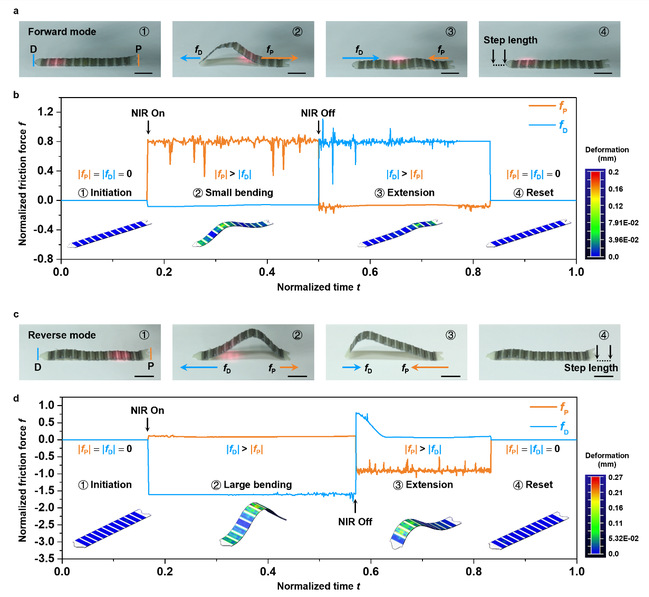
图4.(a)CRAWL在向前爬行过程中的图像,步骤①-④依次表示初始状态、局部小曲率弯曲、伸长(形状恢复)和复位。D:尾端,P:首端。808 nm NIR的辐照强度为1 W·cm-2。比例尺:1 cm。(b)在向前爬行模式下,根据CRAWL的自重归一化的首尾两端摩擦力f。插图展示了CRAWL在前进模式下的模拟结果(色条表示LCE-MWCNTs节段中各网格的应变)。其中,摩擦力朝向CRAWL首端的方向标记为“+”,朝向尾端的方向标记为“−”。(c)CRAWL在向后爬行过程中的图像,步骤①-④依次表示初始状态、局部大曲率弯曲、伸长(形状恢复)和复位。(d)在向后爬行模式下,根据CRAWL的自重归一化的首尾两端摩擦力f。插图展示了CRAWL在后退模式下的模拟结果。
CRAWL的运动模式切换与姿态调整
在面对斜坡等特定条件时,CRAWL不仅能够通过切换爬行和滚动模式来提高其运动效率,还能够在因运动失衡而倒置时,通过自我矫正行为调整姿态,从而有效模拟了珍珠母毛虫的自适应模式切换与姿态调整。CRAWL实现可切换运动模式及可调节姿态的关键在于对其卷曲行为的精确控制。通过对部分或全部LCE-MWCNTs节段进行光控操作,CRAWL通过局部或整体形变实现了自适应卷曲姿态,包括卷曲成环以响应重力作用,以及通过翻身行为恢复其正常爬行姿态。
在全局NIR辐照下,CRAWL整体发生大曲率卷曲,形成一种自适应的类环状构型,从而促进了其在坡面上的滚动行为(图5a)。通过调控CRAWL中LCE-MWCNTs节段的数量,其滚动速度可提高至21.2 ± 0.3 cm·s-1(图5b)。如图5c所示,在相同的坡面上,CRAWL的滚动速度可比其爬行速度快两个数量级,并达到其滑动速度的两倍以上,充分证明了滚动行为在坡面地形上的高效导航能力。
自我矫正行为在CRAWL系统中发挥着关键作用,它使该机器能够在滚动行为后实现姿态矫正,从而确保运动的连续性。CRAWL在滚动后几乎不可避免地会进入倒置状态,导致运动中断。为了实现自我矫正行为,研究者依次刺激了四个LCE-MWCNTs节段,以诱导CRAWL发生局部卷曲。这种卷曲运动从首端向尾端传播,使CRAWL能够完成翻转(状态②,图5d)。随后,通过选择性地激活CRAWL尾端附近沿身体方向的一个或两个LCE-MWCNTs节段,调节两端之间的各向异性摩擦力,使CRAWL逐渐恢复到正常爬行姿态。自我矫正行为的实现主要依赖于以下两个因素:(1)CRAWL中每个节段的大曲率弯曲使其能够完成翻转过程;(2)分节结构和光驱动策略能够实现对CRAWL局部形变的精确控制。
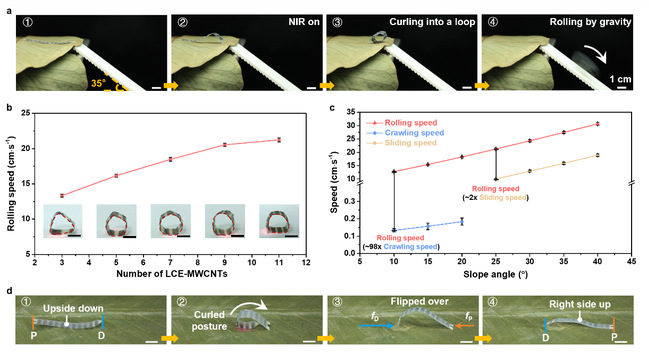
图5.(a)CRAWL卷曲成环产生自适应构型,并在重力作用下快速滚动的照片。(b)在坡角为25°的下坡上,CRAWL的滚动速度随LCE-MWCNTs节段数量的变化关系。插图中展示了在全局光照条件下,节段数量与CRAWL自适应构型的对应关系。(c)下坡坡角对CRAWL的滚动速度、爬行速度及滑动速度的影响。(d)CRAWL自我矫正行为的图像,状态①-④依次表示倒置姿态、局部卷曲、伸长(形状恢复)和正常姿态。P和D分别表示首端和尾端。808 nm NIR的辐照强度为1 W·cm-2。比例尺:1 cm。
CRAWL在复杂环境中的自适应运动行为
本研究首次报道了LCE爬行机器人通过动态切换运动模式并调整姿态,在复杂地形中实现连续导航的实例。通过利用CRAWL的局部小曲率弯曲形变,使两端摩擦力的合力方向始终朝向首端,CRAWL展现了连续的攀爬和爬行行为(图6a-d)。此外,通过采用整体卷曲形变策略,CRAWL形成了环状构型,使其能够通过滚动行为适应从平坦到斜坡地形的变化(图6e、6f)。在滚动过程中,当CRAWL因卷曲姿态的不稳定性而失去平衡并进入倒置状态时(图6g),它利用自我矫正行为恢复至正常爬行姿态(图6h、6i),从而继续执行其运动任务。该软体爬行机器人具有显著增强的运动能力和环境适应性,展现了在不同环境中进行高效探索和导航的巨大潜力。
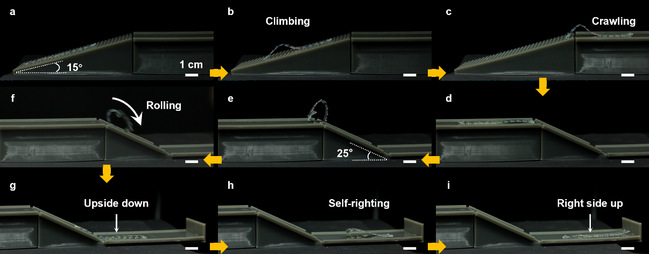
图6. CRAWL在不同环境条件下的仿毛虫自适应运动行为。(a-b)CRAWL在15°倾斜的棘轮表面上攀爬的快照;(c-d)CRAWL在平坦表面上向前爬行的快照;(e-f)在25°坡角的下坡环境中,CRAWL卷曲成环并在重力作用下快速滚动的快照;(g-i)CRAWL在倒置状态下,通过自我矫正行为完成姿态调整的快照。比例尺:1 cm。
电话:021-31243661
传真:021-31243661
邮编:200438
地址:上海市杨浦区淞沪路2005号,复旦大学智能材料与未来能源创新学院(先进材料楼725)
网址:http://lcpolymergroup.fudan.edu.cn
电子邮件:ylyu@fudan.edu.cn
